Es ist schon erstaunlich, was man mit einem Gerät im QRP Bereich alles machen kann, und vor allem wie weit man mit ca. 4 Watt Sendeleistung an einer Endfed Antenne für das 10m und 20m Band kommt.
Hier ein paar Awards der letzten Zeit.






DB4BD Amateurfunk, Elektronik
Hier ein paar Awards der letzten Zeit.
Nach den guten Erfahrungen beim Aufbau des QDX habe ich mir dann den Bausatz zum QMX+ bestellt.
Die Bauteile und die teilbestückte Platine waren recht zügig bei mir in der Post.
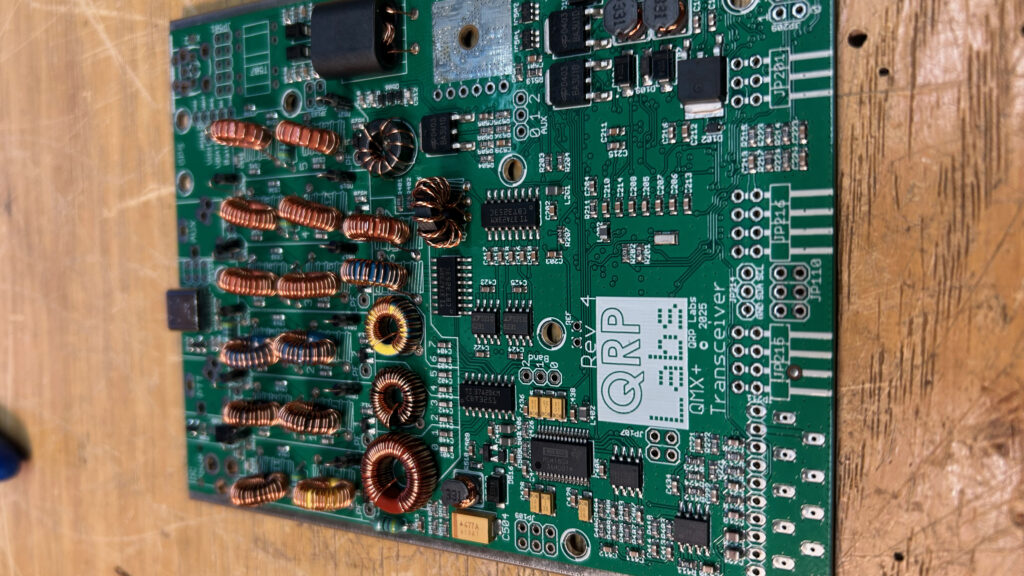
Die Platine ist fast fertig……
Das wickeln der Spulen ist noch das anstrengendste bei der Aufbauarbeit.
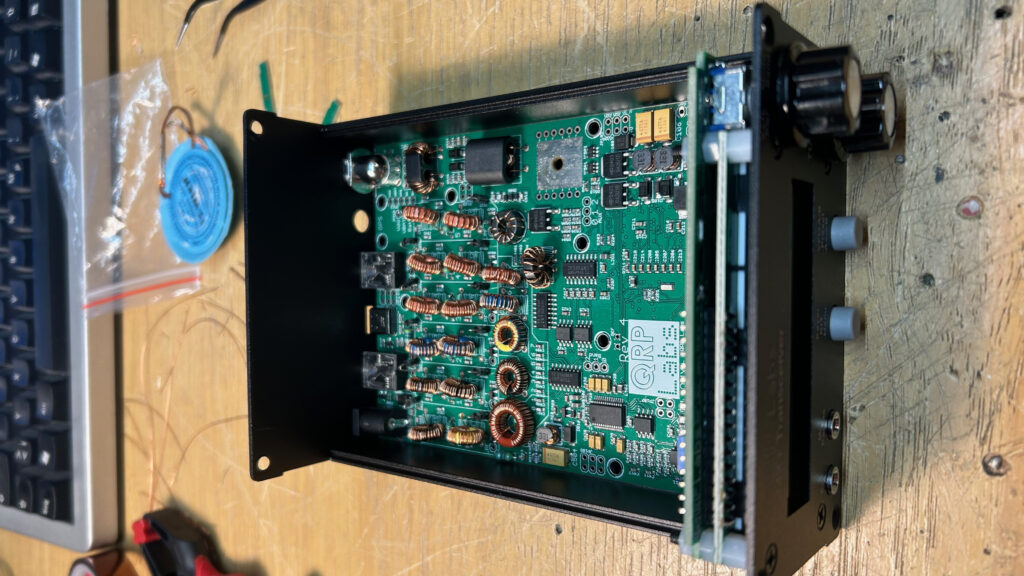

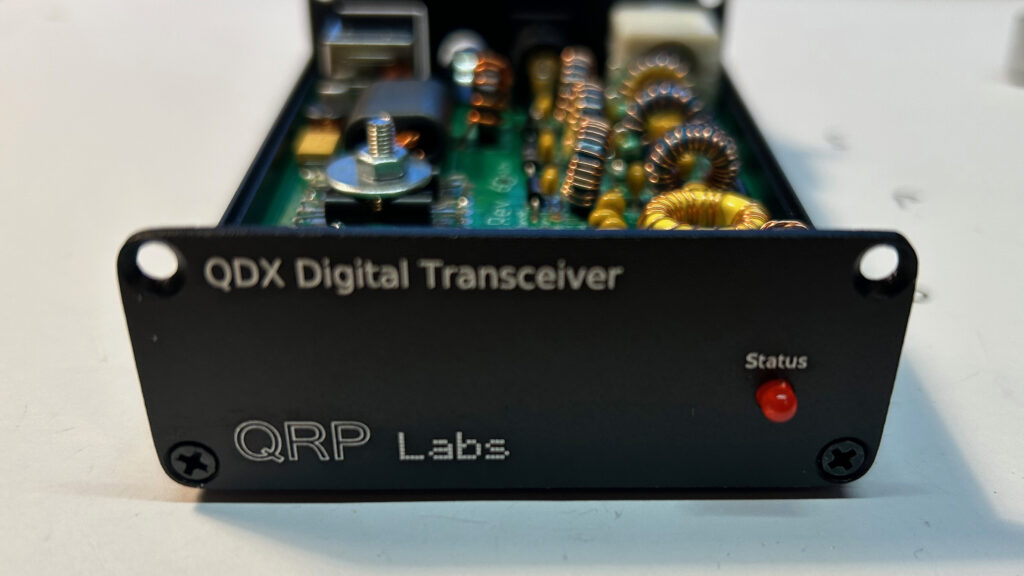
So, fertig und in Betrieb.
Jetzt fehlt nur noch das Mikro für den SSB Betrieb.

Als Lautsprecher benutze ich eine Bluetoothbox mit einem Eingang für 3,5mm Klinke, funktioniert sehr gut, vor allem die Verständlichkeit ist gut.



Der Antennentuner ATU 100 ist für den QRP Betreib in der Orginalversion nicht zu gebrauchen, er braucht zum tunen mindestens 5 Watt.
Mein QDX von QRPLab macht aber nur 4,4 Watt wenn der Akku voll geladen ist, sonst immer so um die 4 Watt, das reicht nicht um den Tuner zum tunen zu bewegen.
Also musste ich ihn anpassen…..
Nach langer Recherche im Netz habe ich folgende Maßnahmen durchgeführt:
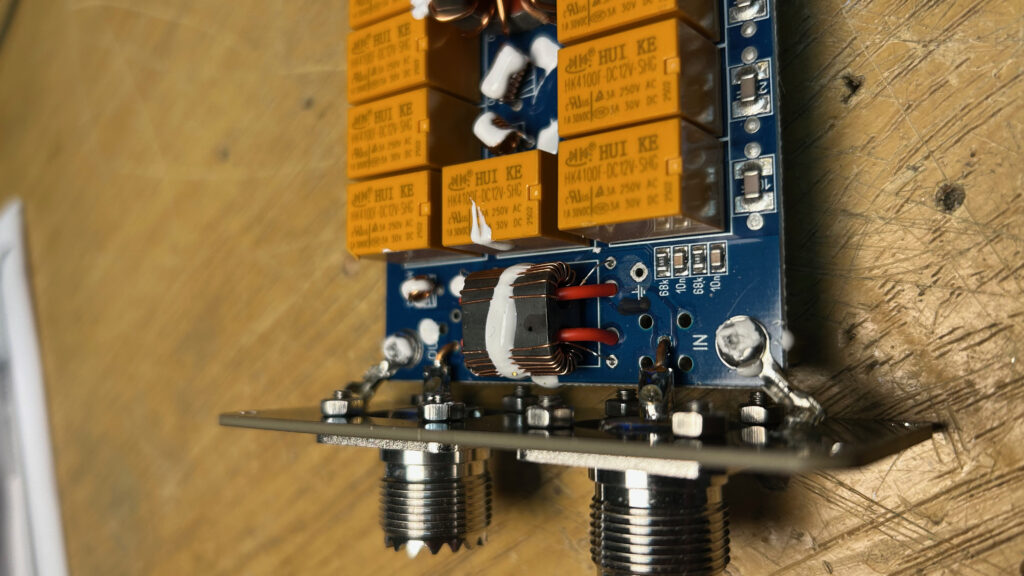
Orginalzustand
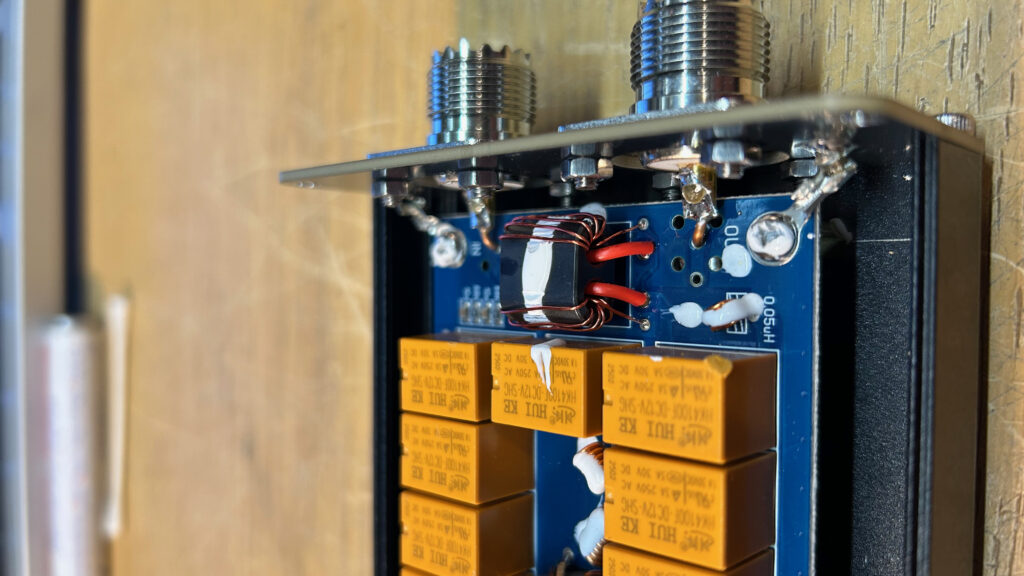
Neu gewickelt
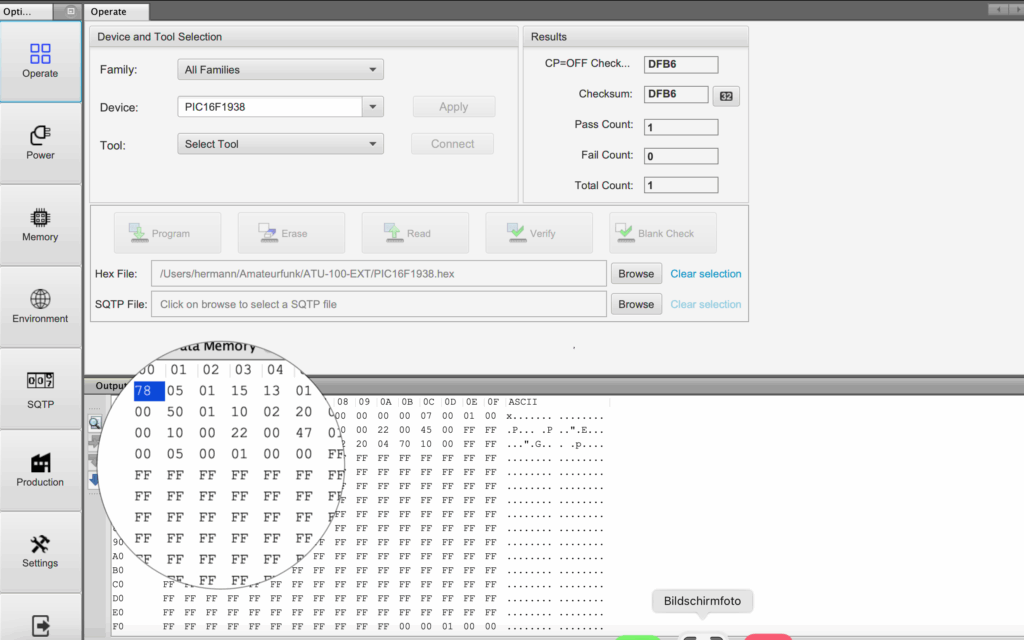
hier die Parameter ändern.
Für die Softwareänderungen habe ich auf meinem Mac die MPLAP IPE (Vers. 6.0) verwendet im Zusammenspiel mit dem Programmieradapter PICKit 3, der ist beim Chinamann günstig zu bekommen. Der Anschuß an den Tuner ist bei IK3SSG zu sehen.
Die neueren Versionen unterstützen den PICKit 3 nicht mehr.
Viel Spass beim Umbau.
Ein SWR Messgerät nach der Idee von 101 Things https://101-things.readthedocs.io/en/latest/power_swr_meter.html
Die Stockton Bridge wurde in einGehäuse aus Platinenmaterial eingebaut, das geht am einfachsten und funktioniert gut. Zusätzlich zur Orginalschaltung habe ich noch ein Modul mit Akkus und Ladeschaltung hinzugefügt.
Das übrige Gehäuse habe ich mit dem 3D Drucker erstellt.

Das Gerät läuft bis jetzt sehr zuverlässig.
„THE GREEN BEAST“
Hier beschreibe ich den Bau eines FT8 Transceivers nach der Idee von Dhiru Kholia.
https://www.electronicwings.com/users/DhiruKholia/projects/4382/global-communications-transceiver
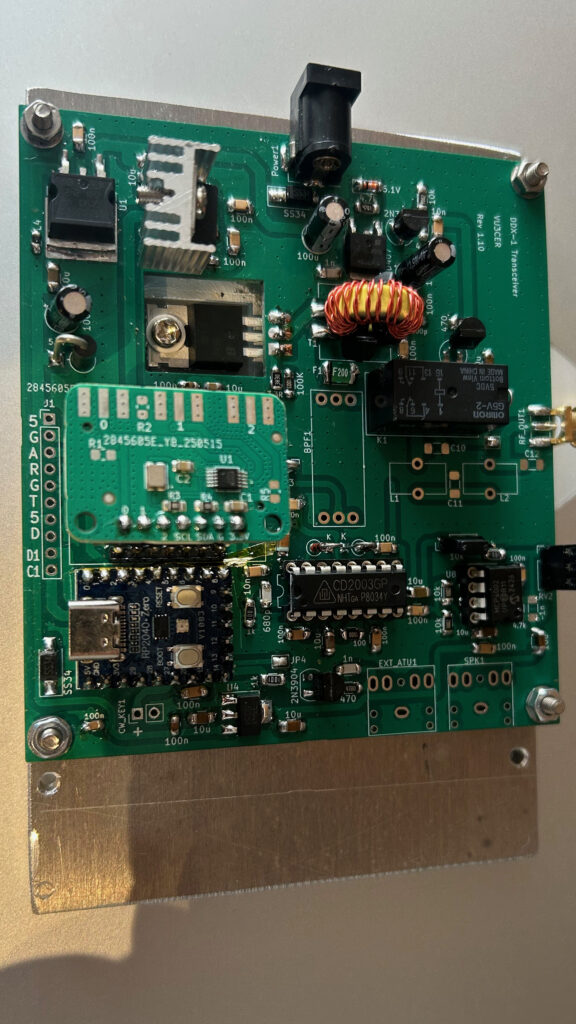
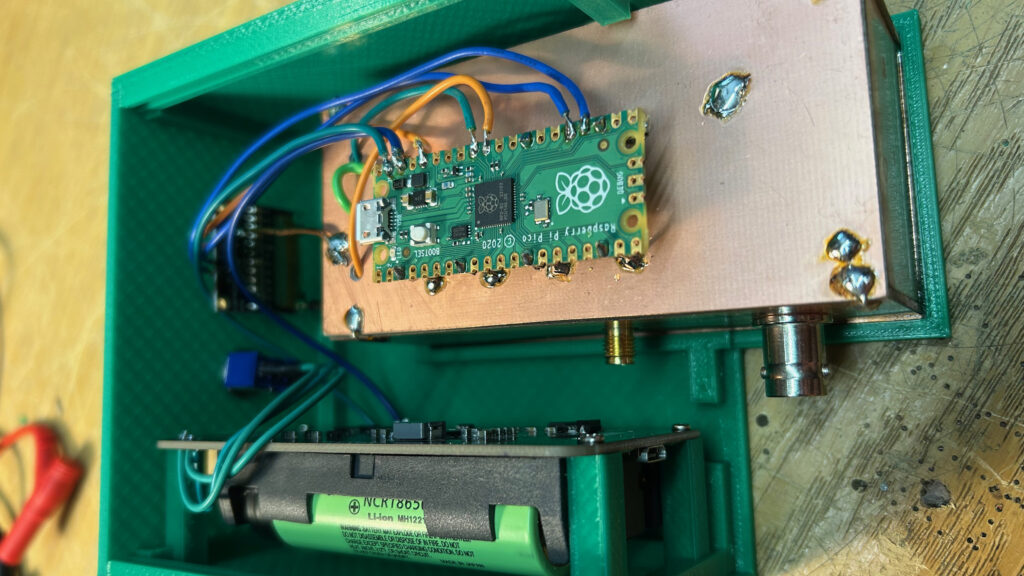
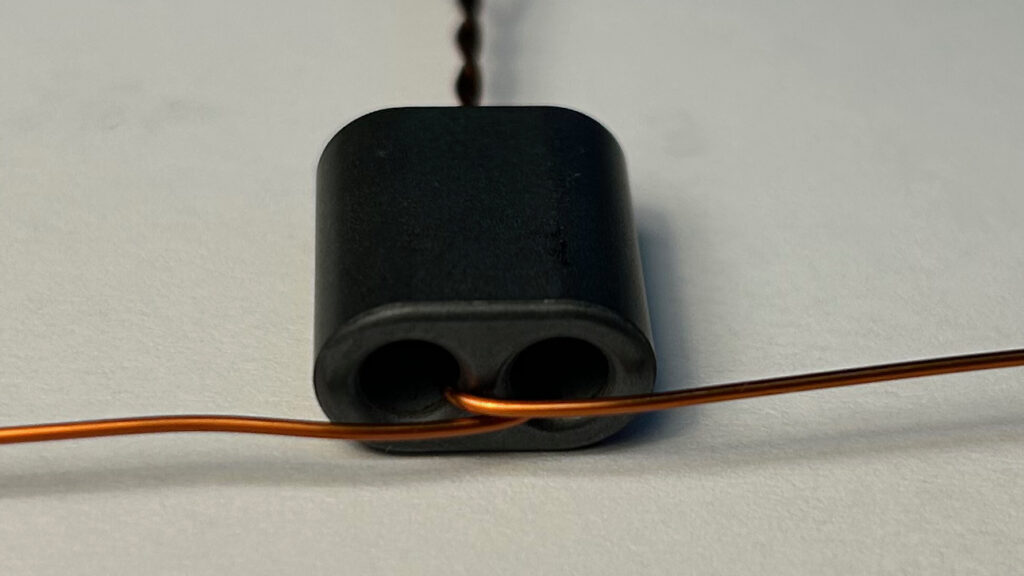
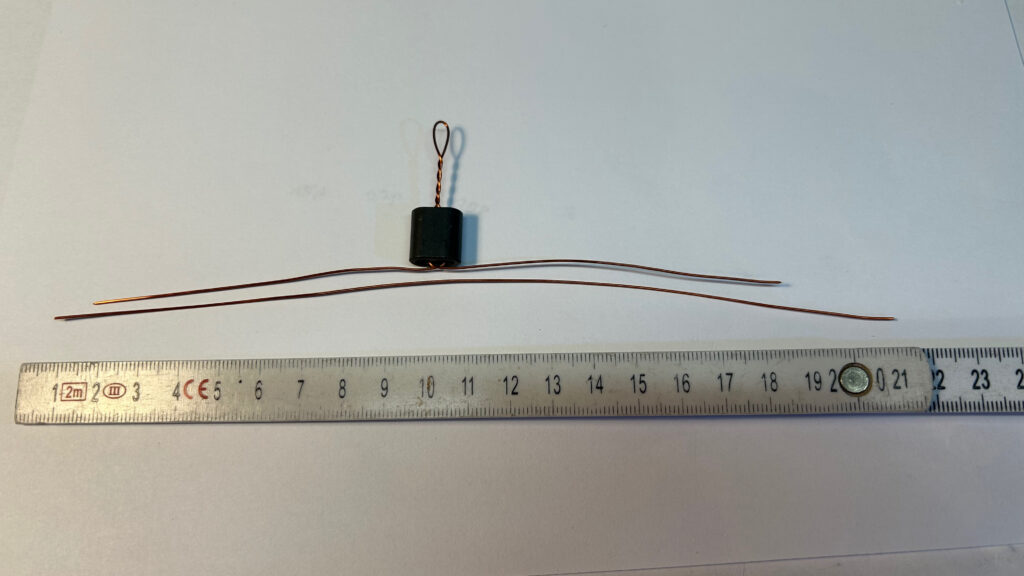
Auf seiner Webseite und bei Github sind alle Daten zum Download vorhanden. Die Beschaffung der Teile hier in Deutschland ist nicht immer so ganz einfach, aber doch irgendwie lösbar. Der Trafo SRF1260A-4R7Y ist wohl bei Digikey zu bekommen, aber die haben eine Mindestbestellmenge und das war mir dann doch zuviel. Also habe ich das Ding selber gewickelt, ca. 18-19 Windungen bifilar auf einem Ringkern T50-6 Amidon. Die Endstufe macht so ca 6-7 Watt Leistung. Die VFO Platine und die Platine selbst habe ich bei JLCPCB bestellt, wobei die kleine VFO Platine als voll bestückt bestellt wurde. Die Gerber Dateien sind auf der Github Seite abrufbar. Als Kühlung für den FET habe ich eine Aluplatte genommen, die war noch da.
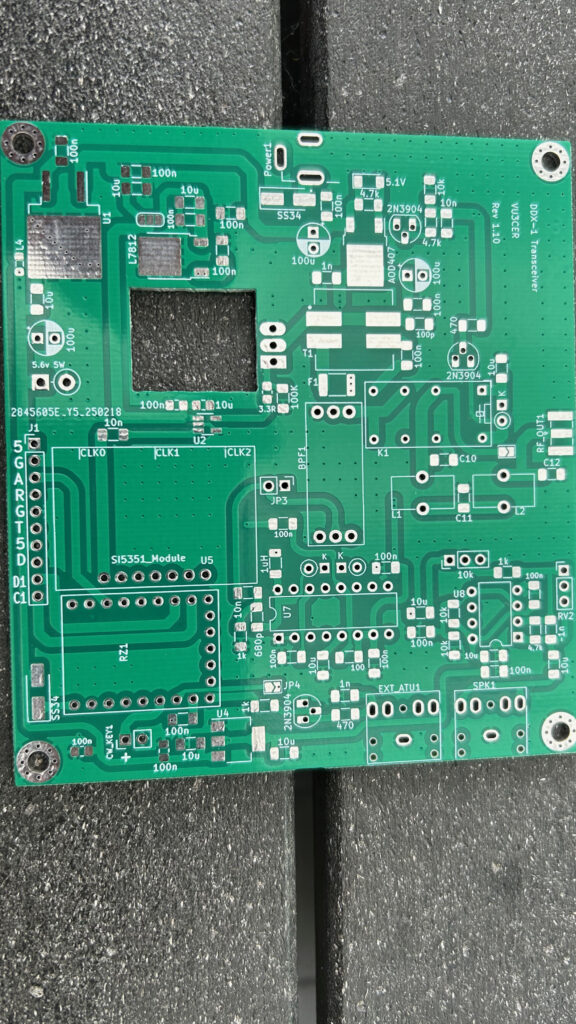
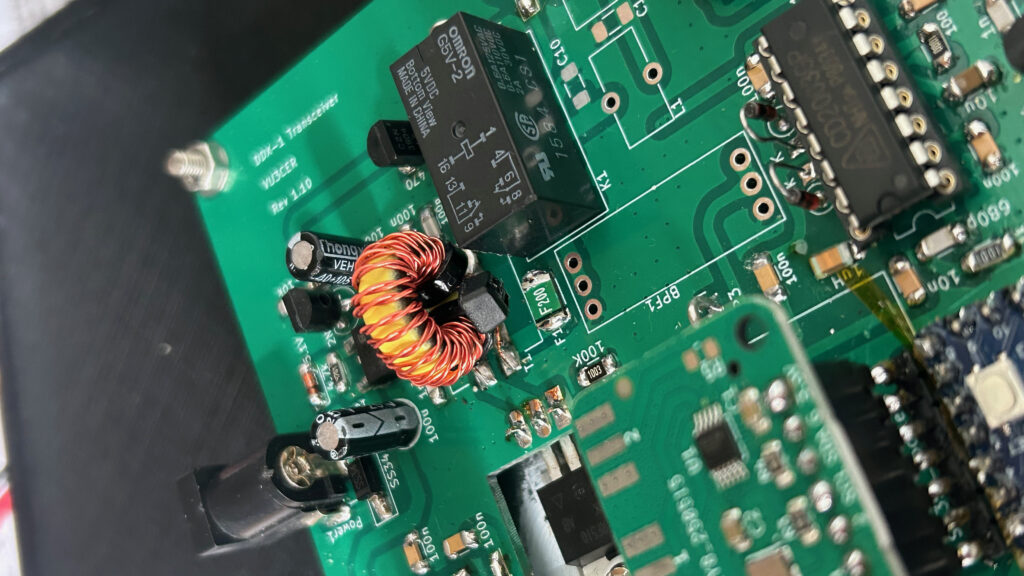
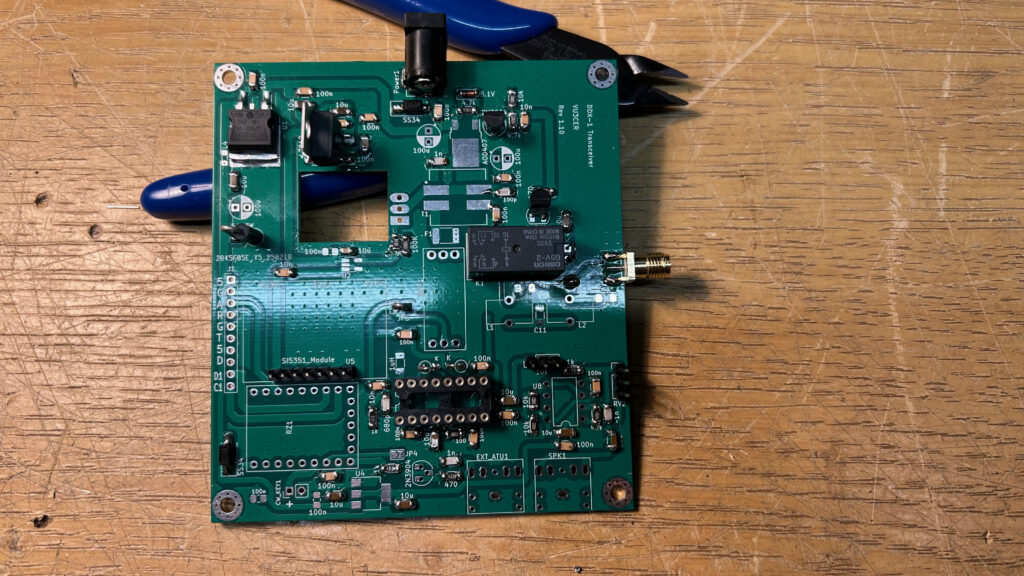
Auf der Platine werden die Bandfilter nicht bestückt, das Problem wird durch ein Bandpassfilter am Antenneneingang gelöst.
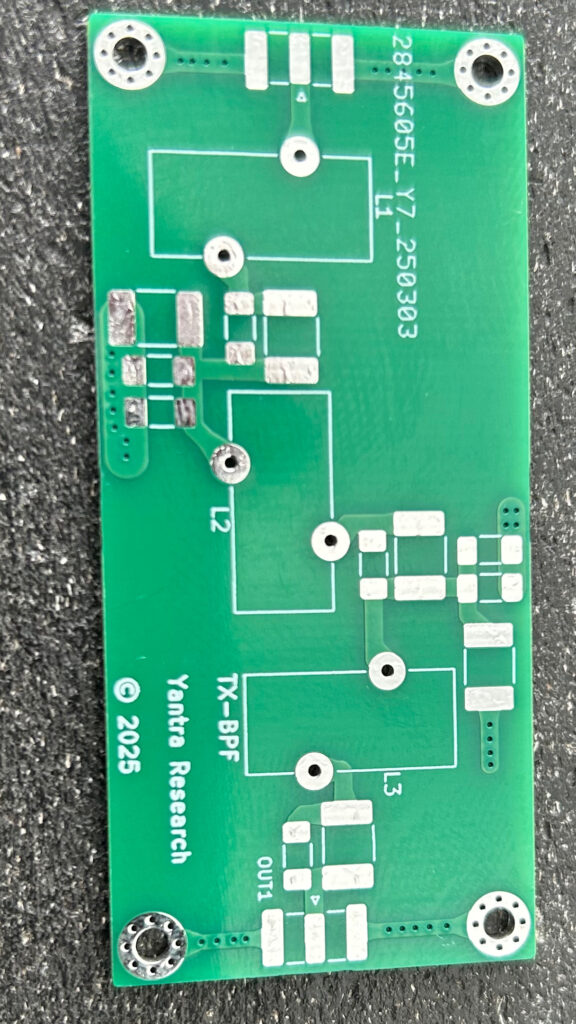
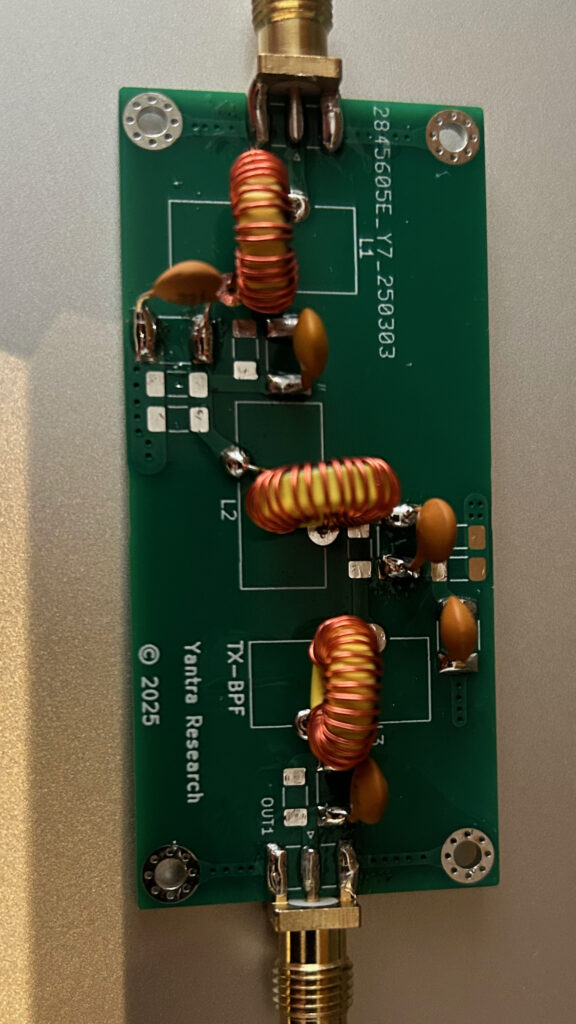
Die Spulen sind auf einem Ringkern T37-6 gewickelt, die Daten für 10m und 20m sind in den Dateien enthalten, für die anderen Bänder muss man das entsprechend umrechnen.
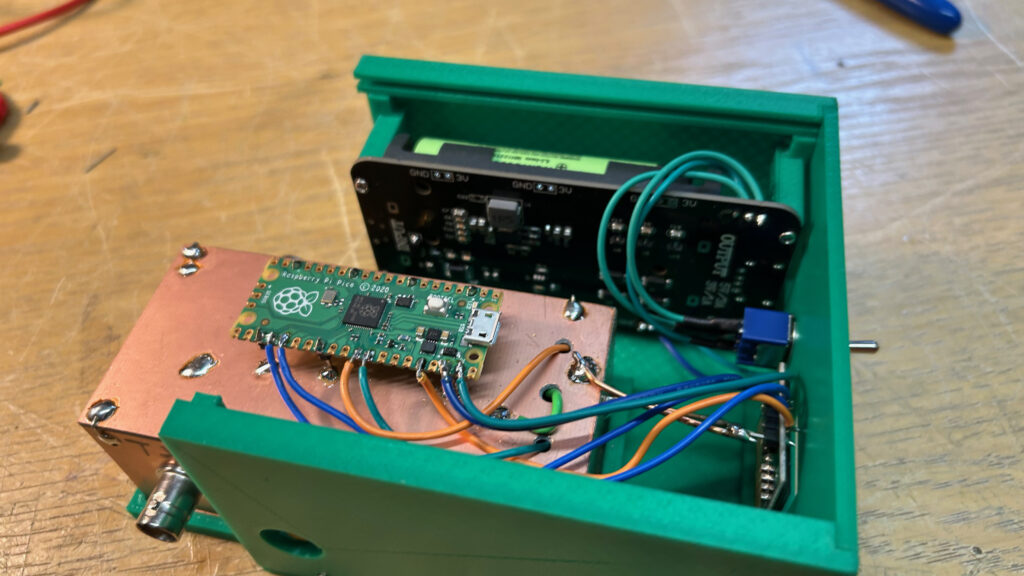
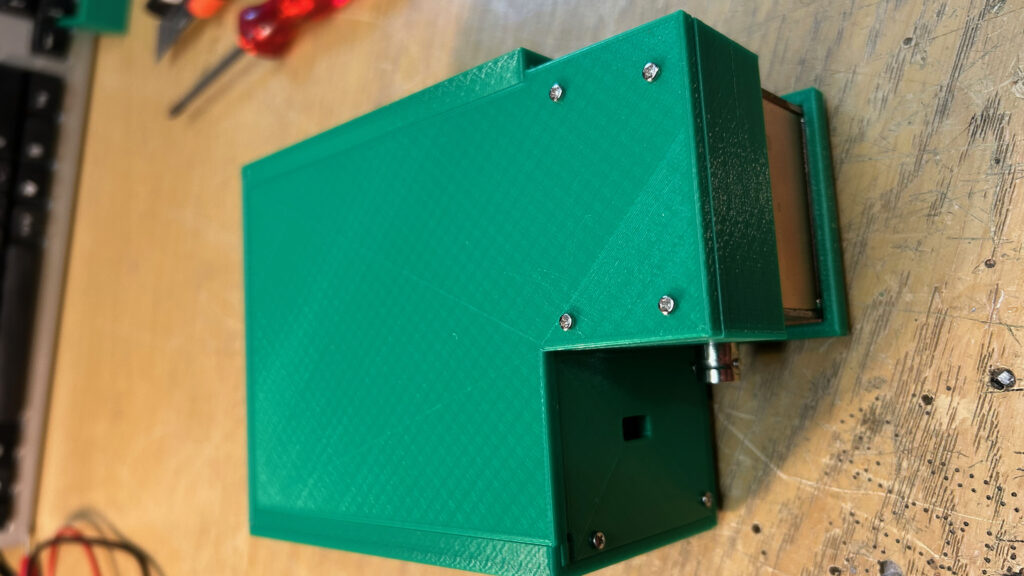
Das Gehäuse
Die Elektronik zu bauen ist ja nicht das große Problem für einen Elektroniker, aber das Gehäuse macht dann doch mehr Arbeit.
Nach längerem Überlegen sollt da auch noch eine Audioendstufe und ein Akku verbaut werden. Da ich noch genug PLA (grün) hatte wollte ich die Teile für das Gehäuse größtenteils aus Kunststoff herstellen. Das Grundgerüst habe ich dann erstmal aus Holz gebaut.
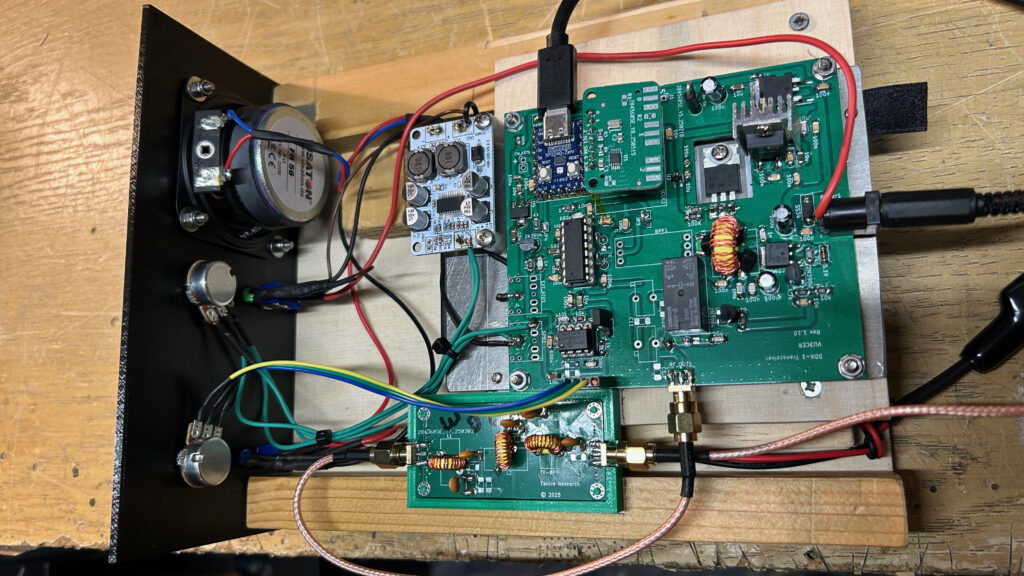
Die einzelnen Teile des Gehäuses sind dann mit Fusion 360 und dem 3D Drucker entstanden, und weil das alles in grün ist habe ich die Kiste „Das grüne Biest “ genannt .


Der FT 8 Transciever hat mir schon eine Menge Verbindungen ermöglicht.
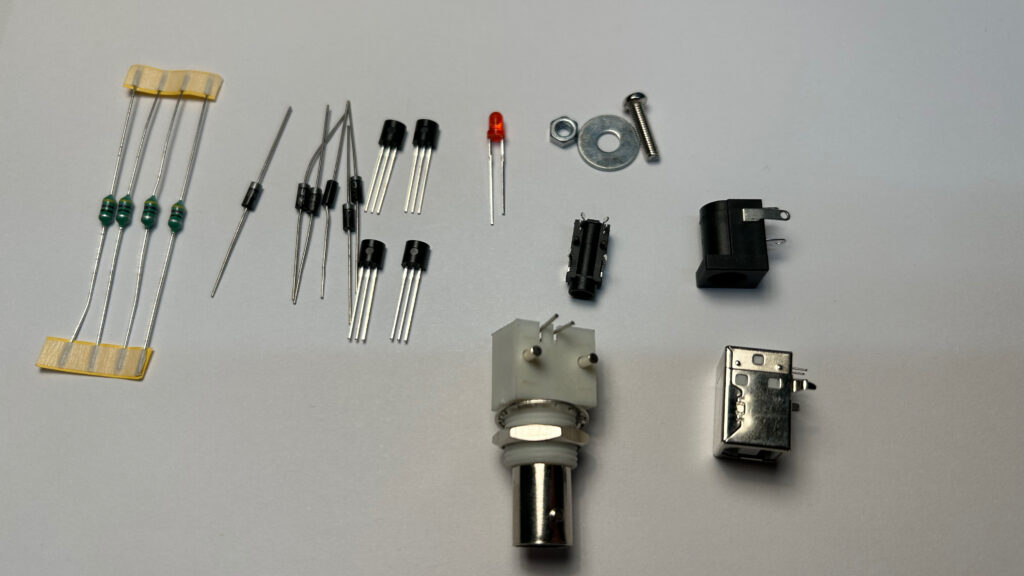
Nachdem der Bauteilesatz von QRP Labs heute eingetroffen ist, konnte ich mit dem Aufbau beginnen.
Zuerst habe ich die Teile auf Vollständigkeit überprüft, es war alles da.

Jetzt konnte es an den Aufbau gehen, ich habe einen Lötkolben mit feiner Spitze benutzt, es geht sehr eng zu auf der Platine. Eine gute Lupe und gutes Licht sind auch notwendig.
Die Bauanleitung von QRP Labs ist sehr gut und man sollte sich strickt an sie halten, lieber noch mal lesen und überprüfen, dann erst das Bauteil einlöten !!



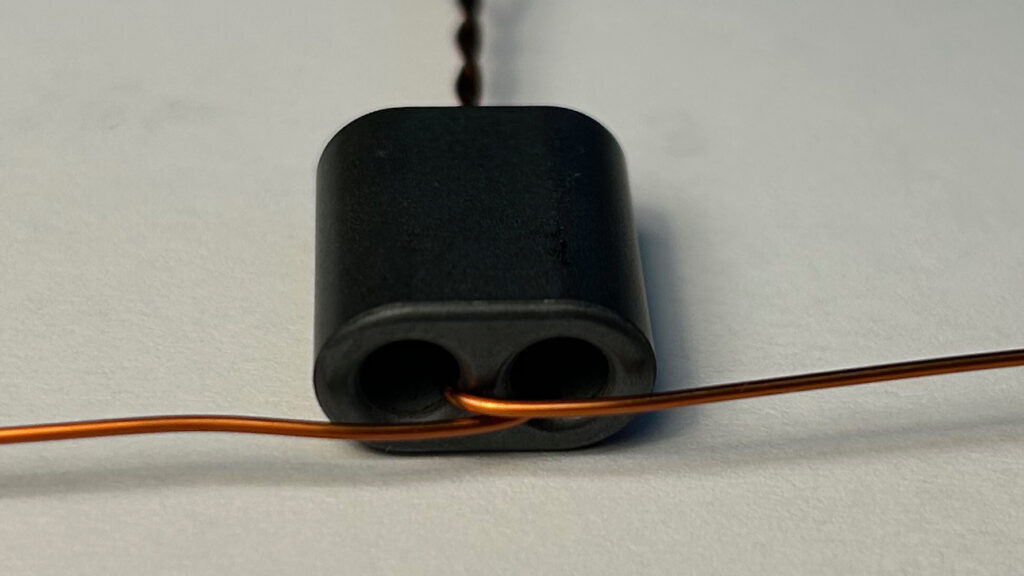
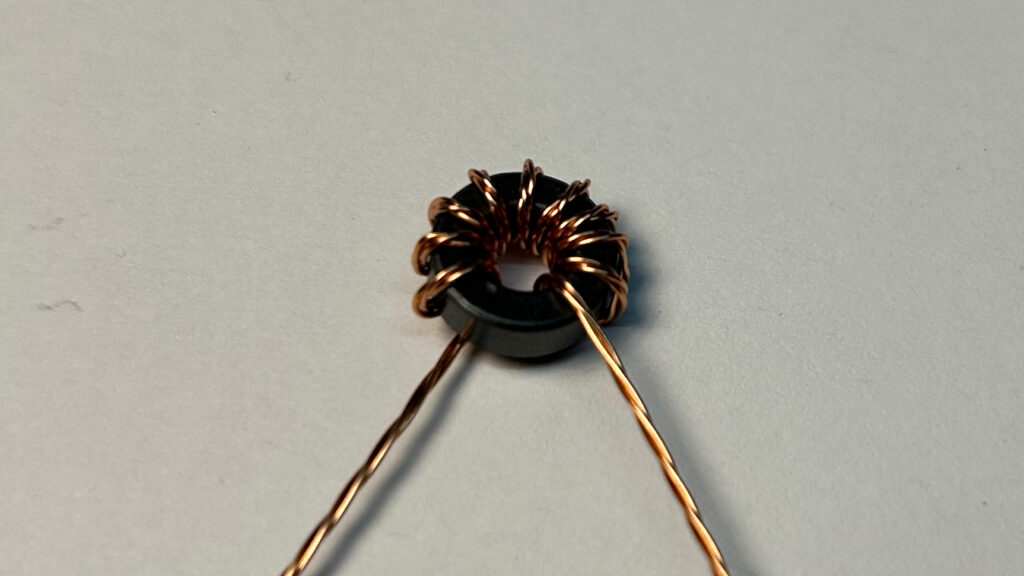
Jetzt kommt die Abteilung handwerkliches Geschick, es müssen Spulen gewickelt werden, zuerst der T 1.
Dafür gibt es eine gesonderte Anleitung. Wichtig ! die Kanten vom Ringkern glätten, da es sonst zu Beschädigungen der Kupferlackdrahtes kommen kann.


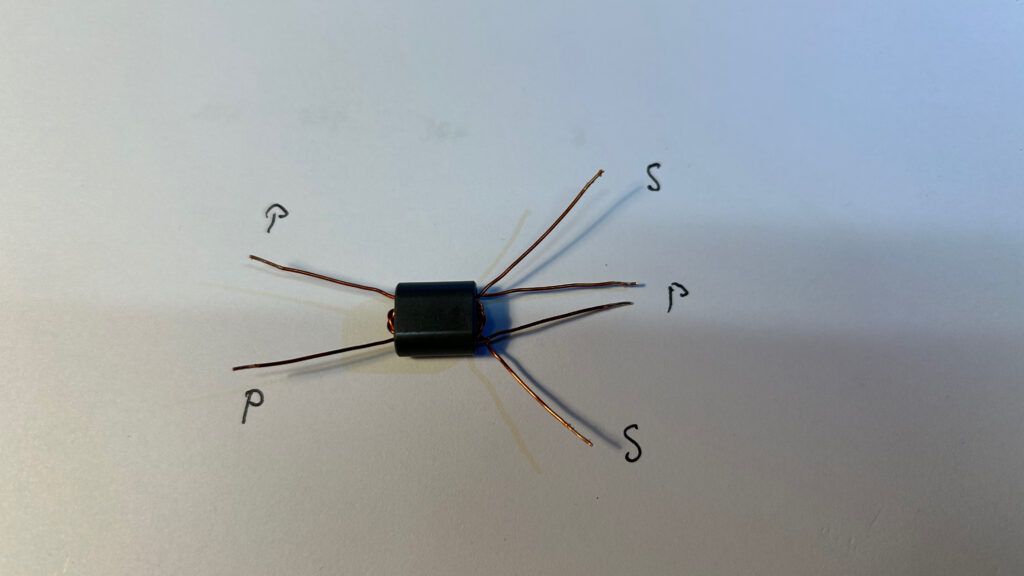







Damit sind die Wickelarbeiten beendet. Jetzt kommen noch die Buchsen und Steckverbindungen. Für die Buchsen habe ich dann zum Schluß eine größere Lötspitze benutzt, bei den Masseflächen geht das besser.
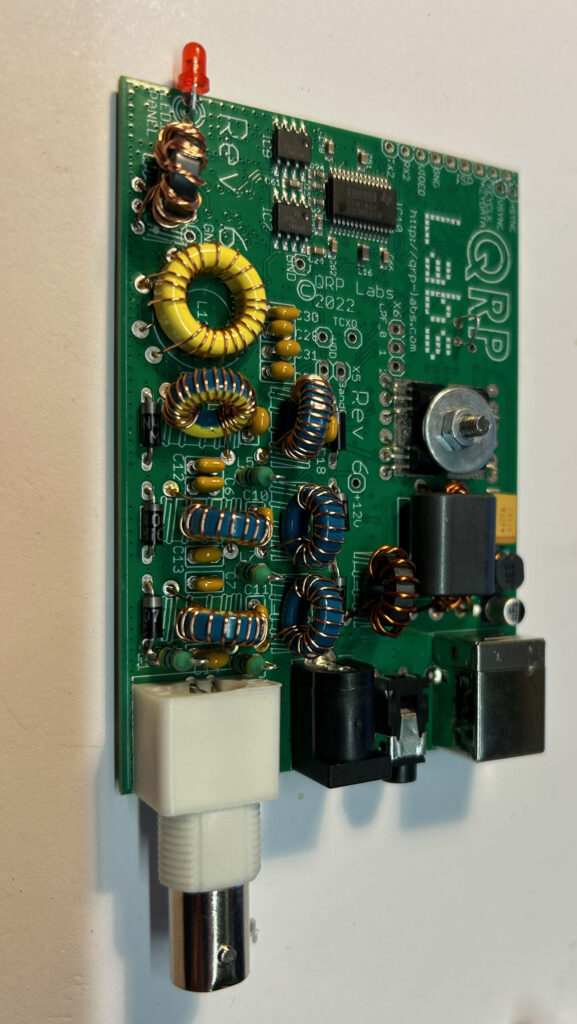


Fertig, dann hoffen wir auf viele Verbindungen in FT8 usw.
73 DB4BD
Um meinen Empfang von den Wettersatelliten zu verbessern habe ich mich entschlossen eine QFH-Antenne zu bauen. Nach langer Suche im Netz bin ich hier ( https://sdr-es.com/construccion-antena-qfh-137/ ) fündig geworden und habe den Bauvorschlag weitestgehend umgesetzt. Es gibt da viele verschiedene Bauvorschläge, z.B. mit Kupferrohr, Kabel, 3D gedruckter Halter usw. Der Bauvorschlag von dem OM EA7KOO gefiel mir dann doch am besten.

Das Material habe ich bei Ebay bestellt, die Alu Flachstangen aber in der Breite von 15mm, da die anderen schlecht zu bekommen waren. Das 40mm HT Rohr habe ich im örtlichen Baumarkt bekommen mit Verschlusskappe. Beim Bau habe ich mich genau an die Maße in der o.g. Bauanleitung gehalten, als Antennenkabel habe ich RG58 verwendet. Nur den Anschluß des Kabels habe ich geändert, meine Lösung ist da glaub ich etwas leichter umzusetzen.



Nach dem Zusammenbau kam dann der Abgleich, bzw. es war gar nicht notwendig, die Antenne war auf Anhieb in Resonanz.
Jetzt muss sie nur noch an ihren finalen Standort und mit dem RaspiNoaa V2 getestet werden.

Die Antenne am finalen Standort.
Hier noch kurz das Geraffelt für den Empfang und die Bilderzeugung…

Der Raspi 3b mit SSD und der RaspiNoaa Software
Der Nooelec SDR Dongel
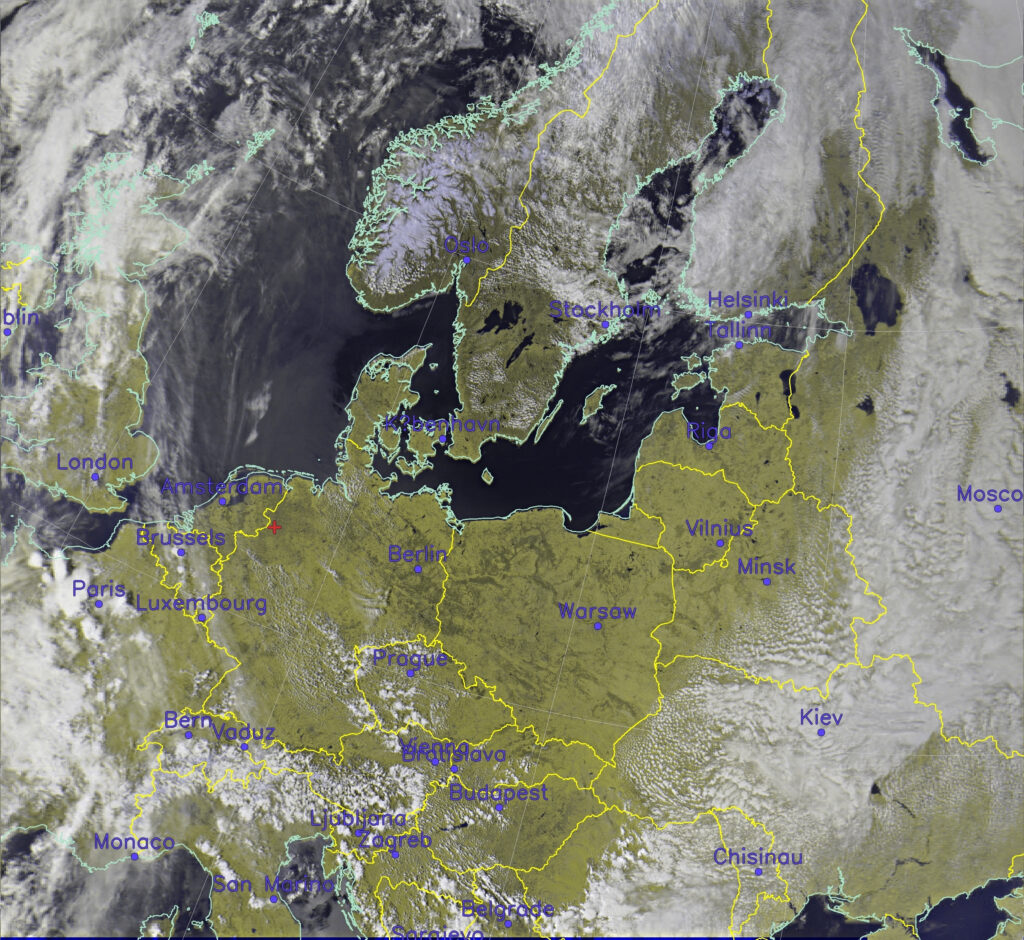
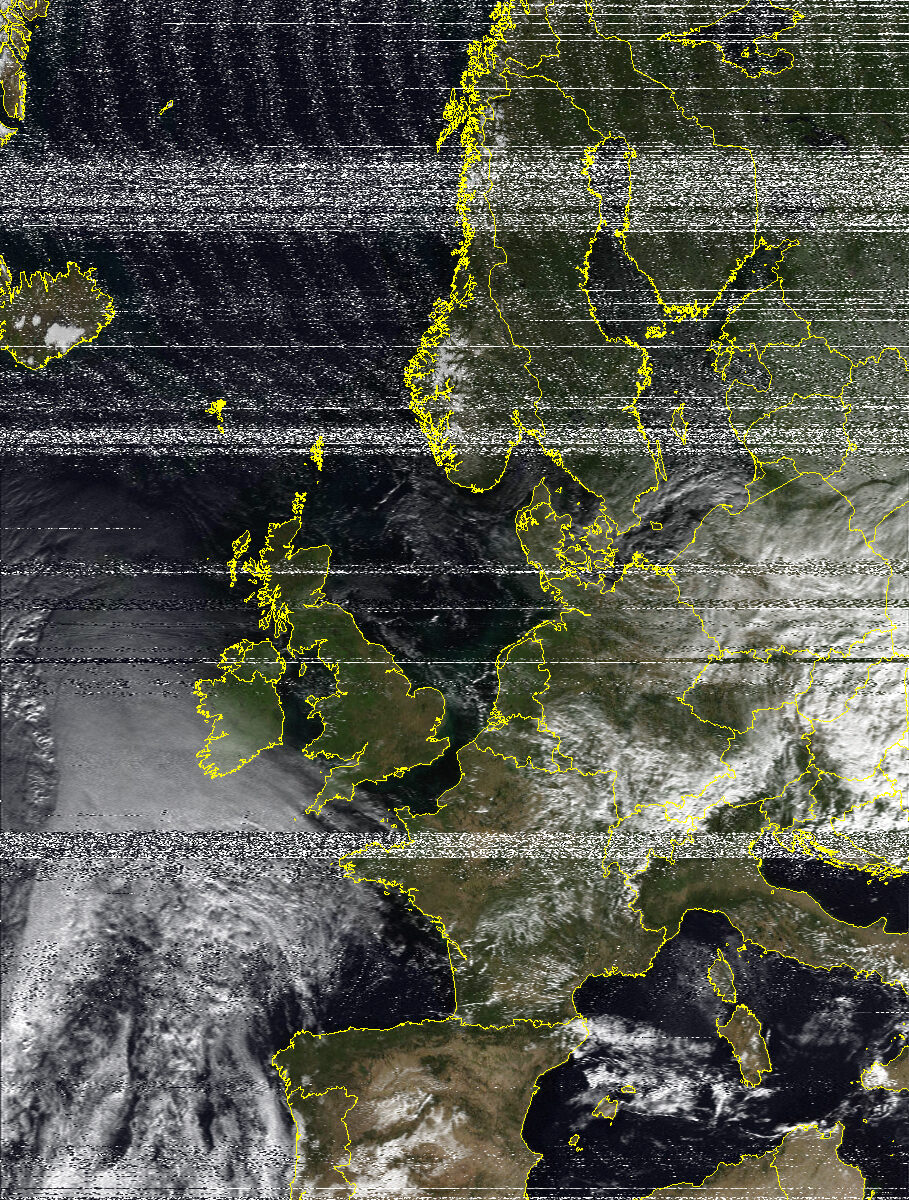
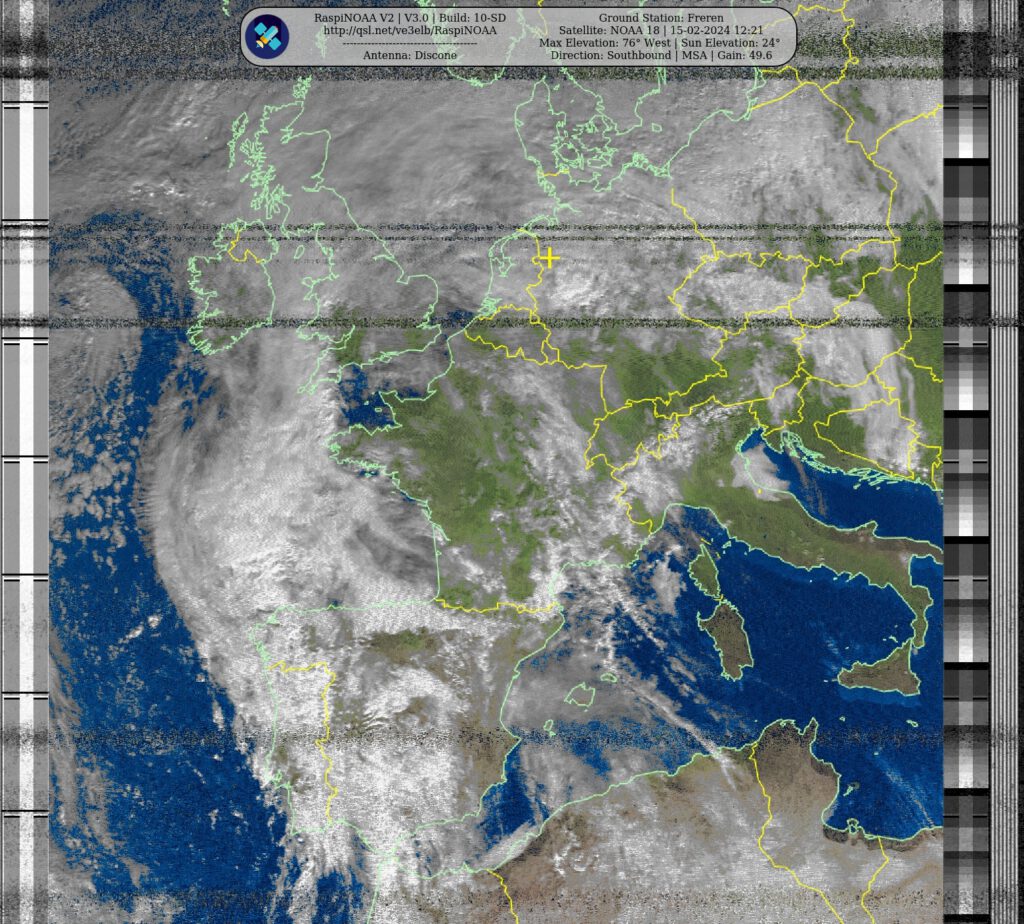
Das sind die ersten Ergebnisse: Bilder der Meteor M2-3 und M2-4 Satelliten

https://www.qsl.net/z33t/english_page1.html
Zuerst habe ich mir ein wenig Kupferblech besorgt und entsprechend zugeschnitten.
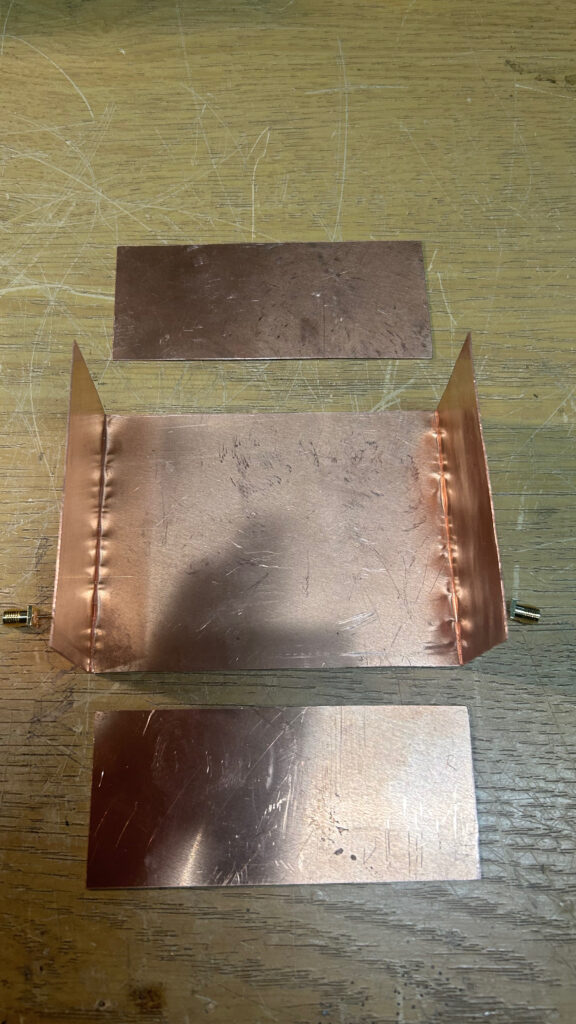
Das sind die Bleche für das Grundgehäuse, jetzt kommen noch die Spulen und die
Kondensatoren dazu.
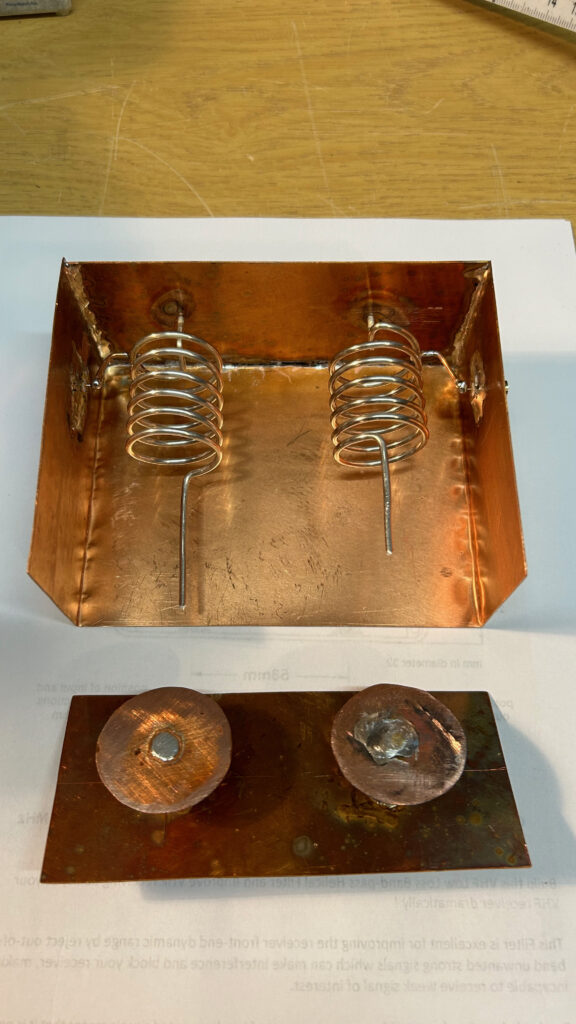
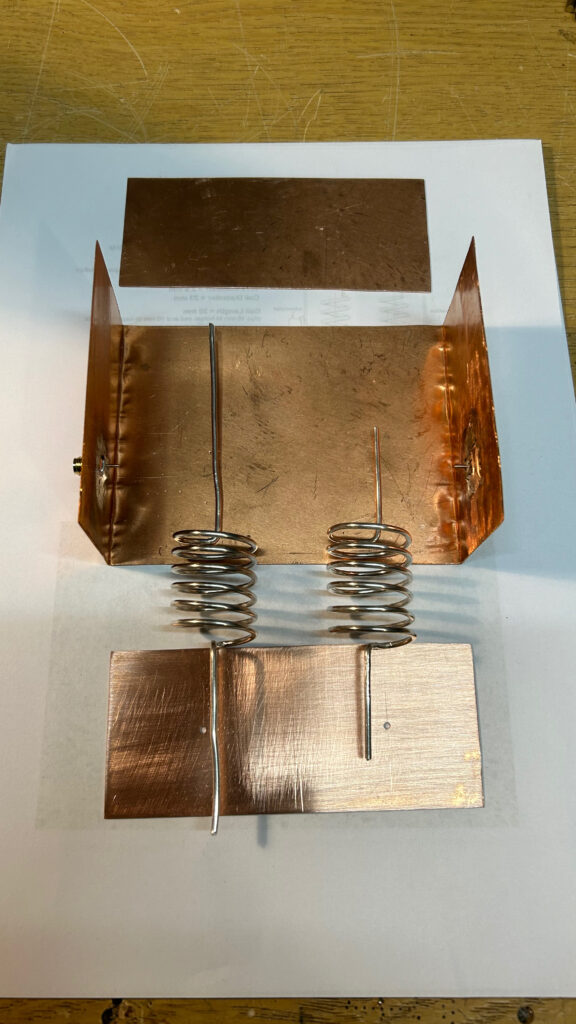
Die Spulen habe ich aus 2mm Silberdraht (hatte ich noch) auf einem 23 mm Plastikrohr gewickelt.
Die Kondensatorplatten habe ich aus dem Kupferblech geschnitten.
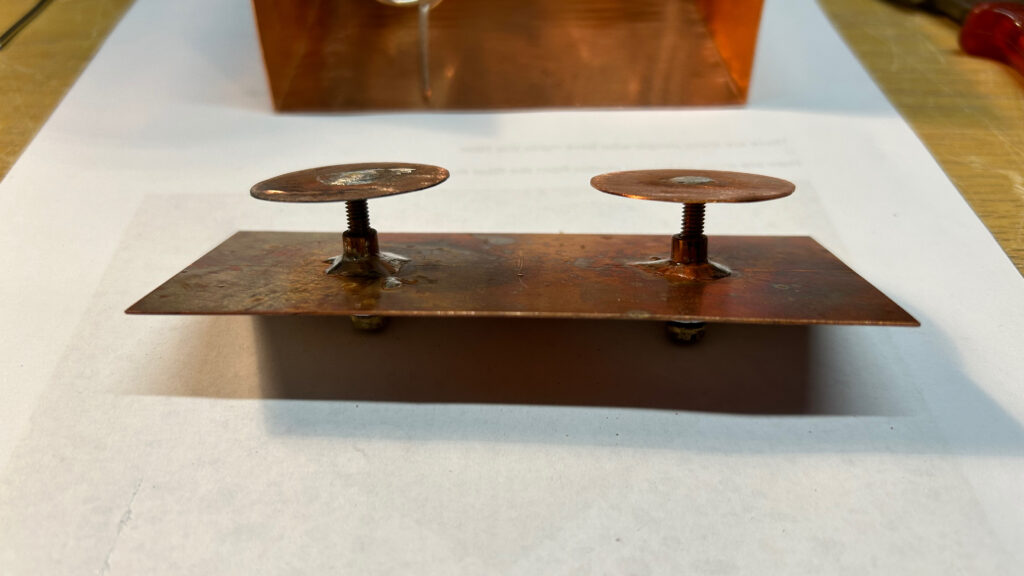
Die Gewinde bestehen aus Messighülsen in die ich ein Gewinde geschnitten habe und in das Blech eingelötet wurden.
Als Ein -und Ausgangsbuchse wurden SMA Buchsen verwendet.


So wird der Anschluß an die Spule ausgeführt.
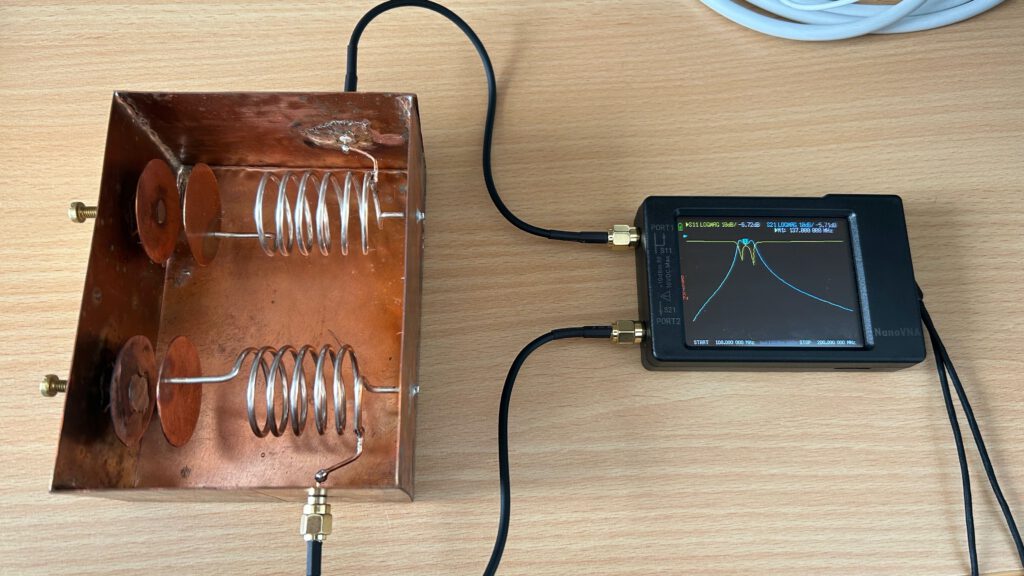
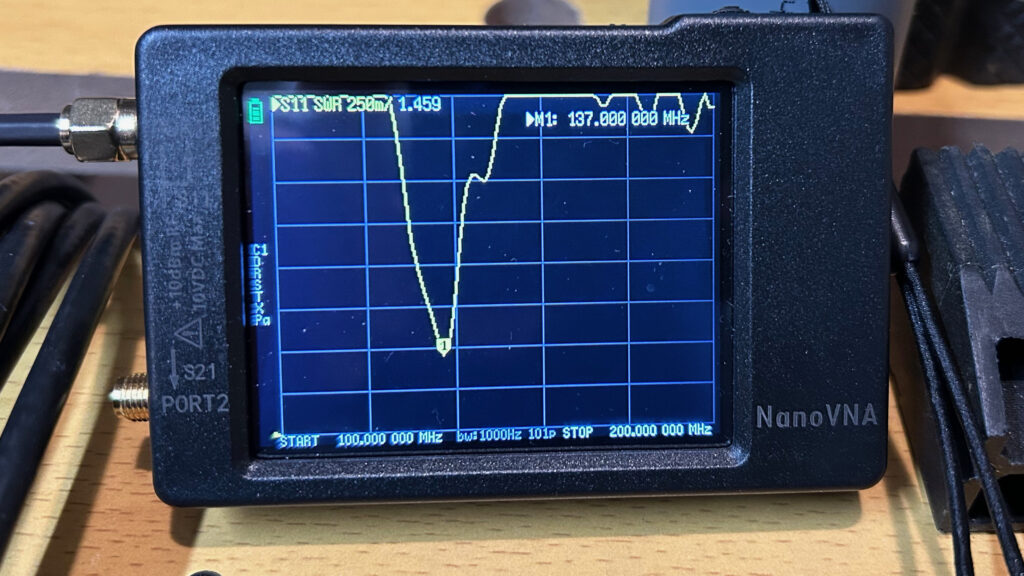
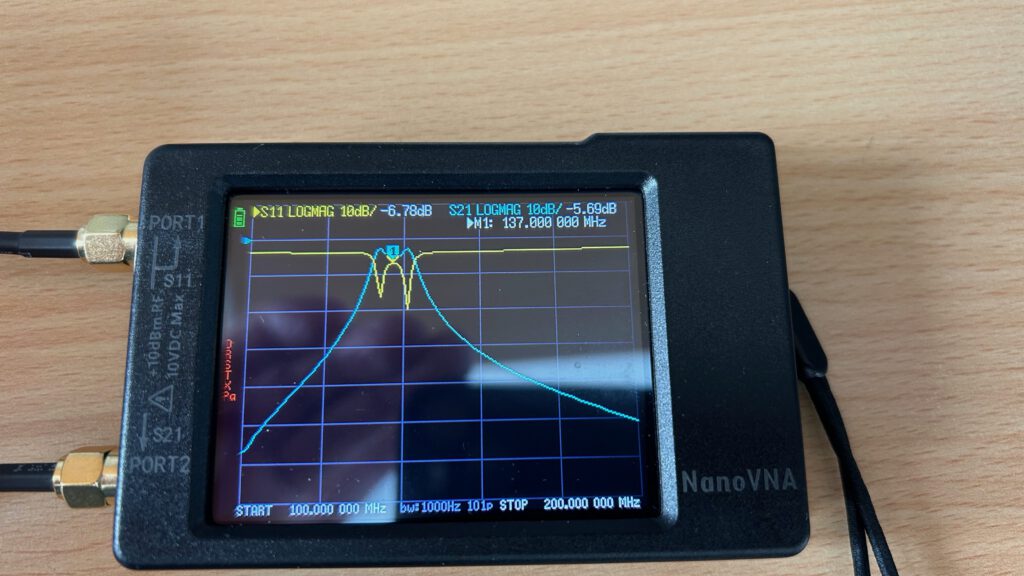
Nach dem Aufbau erfolgte dann die Messung mit einem Nano VNA.
Das Netzteil hat sich mitten im Standby mit einem sirrenden Geräusch verabschiedet, alle Anzeigen aus, keine Reaktion mehr.
Nach Öffnen des Gerätes habe ich erst einmal die Sicherungen und die Spannungen überprüft. Alle Sicherungen waren in Ordnung und im Leistungsteil des Netzteils war hinter dem Gleichrichter die Spannung vorhanden. Das Netzteil besteht im Grunde aus zwei Komponenten, dem Leistungsteil und dem Hilfsnetzteil für die Versorgung der Steuerung mit einer festen Spannung.
Die Steuerung hatte keine Spannung.
Die Ursache für diesen Fehler ist das IC U1 ein DK124, das ist ein Schaltnetzteil IC.
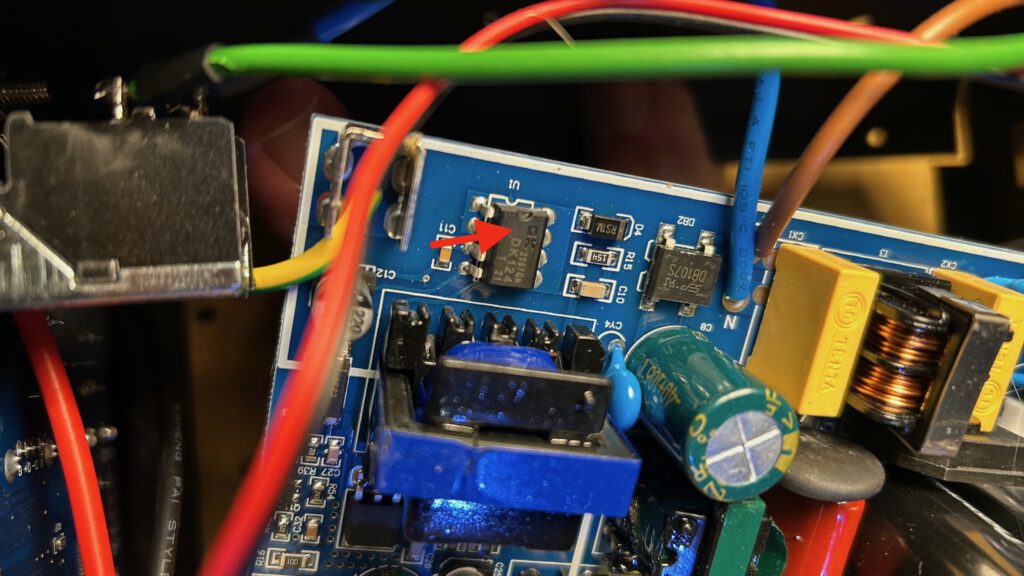
Wenn man sich das Datenblatt dazu ansieht, stellt man fest das der Baustein hier in der Standartapplikation eingesetzt wurde.

Also Ic bestellt, ein paar Tage gewartet und gestern eingebaut. Gerät wieder zusammen gebaut, alle Anschlüsse überprüft und eingeschaltet, keine Rauchwolken und die Anzeigen waren auch wieder da. Danach das Netzteil auf Funktion getestet, alles ok.
Als Abschluss ein kühles Getränk und der Tag war gerettet.
Seit ein paar Wochen bin ich dabei mal wieder was in Richtung Amateurfunk und Empfang von Wettersatelliten zu machen. Zuerst hab ich mit einer SDR-Sofware und einem RTL-SDR Stick Bilder der NOAA Satelliten aufgenommen. Als Rechner dient ein Macbook Pro, die Software ist SDR++ für den Empfang, GPredict zur Steuerung (Frequenzregelung wegen des Dopplereffekts), und zur Demodulation das Programm Satdump. Als Antenne dient eine breitbandige Discone Antenne auf dem Dachboden, dass ist sicher nicht optimal, aber fürs erste geht das. In Zukunft werde ich mir eine QFH Antenne bauen, die empfängt dann auch das rechts polarisierte Signal etwas besser, und die Antenne bekommt draußen eine neuen Standort.
Das funktionierte soweit ganz gut, der Nachteil ist, man muss den Rechner immer laufen lassen und der Empfang und die Demodulation von dem russischen Meteor M2-3 ist noch ein wenig aufwendiger und ist mir mit der Kombination so auch nicht gelungen.
Nach einigem Stöbern im Netz bin ich auf das Projekt RaspiNoaa V2 gestoßen, das ganze ist auf Github veröffentlicht. https://github.com/jekhokie/raspberry-noaa-v2 .
Nachdem ich noch einen Raspi3b zur Verfügung hatte, hab ich das Ganze mal installiert. Die Installation ging soweit problemlos, wenn man sich mit den Rapi ’s so ein wenig auskennt.
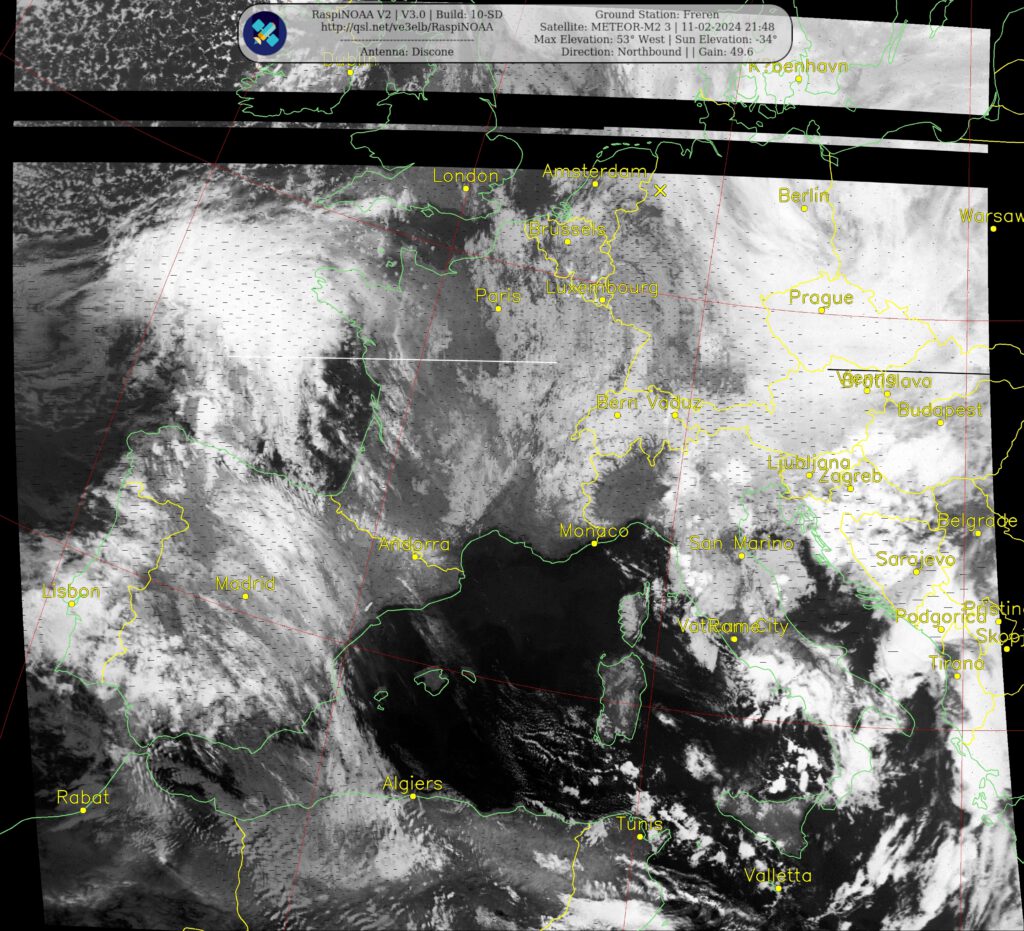
Meteor M2-3 Aufnahme
Auch der Empfang von Meteor M2-3 geht, aber mit Einschränkungen, da die Antenne des Satelliten nach dem Erreichen der Umlaufbahn nicht richtig ausgefahren wurde und so die Senderichtung zur Erde nicht passt.
Wenn der Satellit von Norden nach Süden fliegt ist der Empfang fast nicht möglich, das Signal ist mehrfach weg. Fliegt er von Süden nach Norden und etwas westlich von meinem Standort, dann sind Aufnahmen wie oben möglich, also scheint das mit der Antenne des Satelliten dann wohl so zu sein.